


洞察万物,知行合一
From Perception to Action, Seamlessly.

更可靠,更便宜

策略,更鲁棒

具身智能体
能思考,反应快



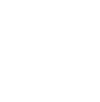
基于大脑架构,无需预设地图即可直觉化理解复杂地形。它通过视觉几何感知坡度与路面起伏,像动物一样在荒野与废墟中实现敏捷避障与极限穿梭。
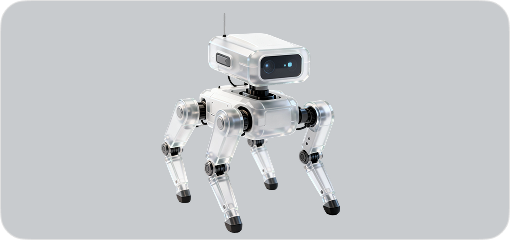
深度融合视觉语义与身体尺度,实时理解室内布局与物体尺寸。它能像人一样自然感知“身体能否通过”或“手部触达方位”,在复杂居家环境中实现高度拟人的空间漫游。
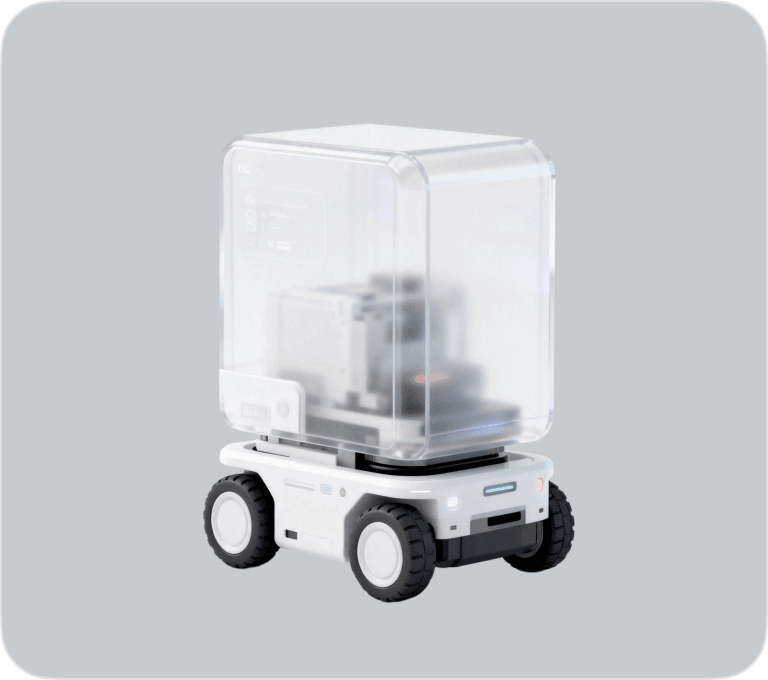

摆脱磁条与固定路线,仅凭第一视角视频流即可精准识别货架位姿与障碍深度。这种无需建模的空间感知力,让小车能在动态车间内实现即插即用的极速部署与智能搬运。


